热点资讯
- 上海博虎实业QSn4-4-2.5可零切出售&QSn4-4-2.5现货供应交期快
- 北京40NiCrMo16合金结构钢光圆板材40NiCrMo16合金结构钢货全
- 莎暮儿无砂管##甘肃甘南合作打井用管200380工程打井管操作简单
- 扶沟路面加热型密封胶价格
- 宜昌302不锈钢板材诚信商家
- 耐高温片材硅油性价比高厂家直销抚州广昌
- 烟气在线检测CEMS升降梯发明专利-四会网
- 白城$金属1.4948规格1.4948回火温度
- 漳州学校校园宣传栏公告栏厂家款式多样
- 沧州市化工池堵漏公司_进口纳米材料
- 上海博虎特钢75号钢性能75号钢——化学成分及用途
- 山西运城各种报废电缆电线回收/各种报废电缆电线回收回收二手电缆
当前位置: 主页 > >
西段乡传动装置伊明牌ALF060-L2-35-K7-11稳性能伺服减速机
文章来源:ymcdkj
发布时间:2024-04-28 18:24:47
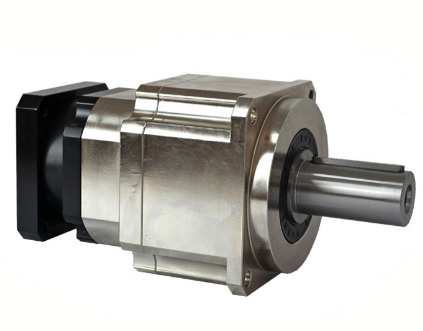
K7-11稳性能伺服减速机
非线性误差:这是表征此传感器输出的电压信号与负荷之间对应关系的程度的参数。例量程为5吨的传感器,在极端理想条件下,空输出为零,满负荷输出为5时,则在1吨时应输出为1,2吨时应输出为2,3吨时应输出3,4吨时应输出4。但事实上这样的传感器是不可能有的,它必然有误差,此不一一对应的误差,称为非线性误差。国标表达:在被试传感器上顺序施加不少于5级载荷,通常为%、2%、4%、6%、8%、1%的额定载荷。
行星齿轮减速机工作原理:
1)齿圈固定,太阳轮主动,行星架被动。 此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
2)齿圈固定,行星架主动,太阳轮被动。此种组合为升速传动,传动比一般为0.2~0.4,转向相同。
3)太阳轮固定,齿圈主动,行星架被动。此种组 向相同。
4)太阳轮固定,行星架主动,齿圈被动。此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
5)行星架固定,太阳轮主动,齿圈被动。传动比一般为1.5~4,转向相反。
6)行星架固定,齿圈主动,太阳轮被动。此种组合为升速传动,传动比一般为0.25~0.67,转向相反。
7)把三元件中任意两元件结合为一体的情况:当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情况。行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接档。
8)三元件中任一元件为主动,其余的两元件自由:从分析中可知,其余两元件无确定的转速输出。
行星减速机尽量选用接近理想减速比。减速比=伺服马达转速/行星减速机出力轴
行星减速机转速扭力的计算:
对行星减速机的寿命而言,扭力计算非常重要,并且要注意加速度的扭矩值,是否超过行星减速机之负载扭力。
行星减速机选型及注意事项:
适用功率通常为市面上伺服机种的适用功率,行星减速机的适用性很高,工作系数都能维持在1.2以上。
电机的额定转矩 启动转矩 堵转转矩 转矩 静转矩 额定转矩:在额定电压、额定负载下,电动机转轴上产生的电磁转矩称为电动机的额定转矩。 启动转矩:当给处于停止状态下的异步电动机加上电压时的瞬间,异步电动机产生的转矩称为起动转矩。启动转矩表征了电动机的启动能力,它与启动方式有关(如星三角起动,变频调速起动等),直接起动鼠笼式一般为额定力矩的0.8到2.2倍。通常起动转矩为额定转矩的125%以上。与之对应的电流称为起动电流,通常该电流为额定电流的6倍左右。 对于直流电机来说,这个启动转矩特别大,所以启动电流也就很大,故而不能直接启动,当然这是对于大型直流电机而言,小型的直流电机包括永磁的都是例外。对于交流电机来说这个转矩就不是很大了,所以电流也不是很大,可以直接启动,当然交流电机启动转矩小所以不能带载启动。 转矩:电动机转矩从稳定区进入不稳定区的交界点。也就是说,如果负载转矩大于电动机的转矩,电动机的输出转矩会变小,并进入堵转状态。
+< 00-P2-P1
200-P2-P1