热点资讯
当前位置: 主页 > >
广府镇齿轮箱直连式BH180A-L2-25-B2-D1-S6一段行星减速箱
文章来源:ymcdkj
发布时间:2024-05-01 08:57:00
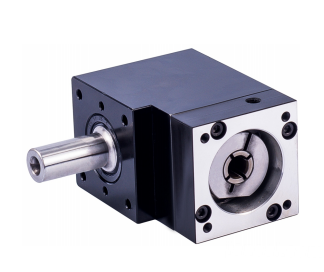
2-D1-S6一段行星减速箱
湿法保养锅炉恢复运行时,应将锅水全部放出,重新上软化水。干法保养干法保养是利用干燥机吸收潮气使锅炉内部金属保持干燥,以防止锅炉的腐蚀,通常采用生石灰或无水氯化钙作干燥剂。锅炉停炉后,将锅水放尽,水垢和烟灰,关闭蒸汽管,给水管和排污管道上的阀门,与其他运行中的锅炉完全隔绝。接着打入孔使锅筒自然干燥,如果锅炉房潮湿,用微火将锅炉本体,以及炉墙,烟道烘干。然后将装有生石灰或无水氯化钙的托盘(或木盒)放在炉盘上,以及锅筒集箱和烟道内,必要时,用布袋吊装在锅筒内,以吸收潮气。
行星减速机为什么会出现断轴其中的原因有哪些
1、在加速和减速的过程中,行星减速机输出轴所乘受瞬间的扭矩如果超过了其额定输出扭矩的2倍,并且这种加速和减速又过于频繁,那么 终也会使其断轴。考虑到这种情况出现的较少,故这里不再进一步介绍。
2、错误的选型致使所配行星减速机出力不够。有些用户在选型时,误认为只要所选减速机的额定输出扭矩满足工作要求就可以了,其实不然,一是所配电机额定输出扭矩乘上减速比,得到的数值原则上要小于产品样本的相近减速机的额定输出扭矩,二是同时还要考虑其驱动电机的过载能力及实际中所需工作扭矩。理论上,用户所需工作扭矩一定要小于额定输出扭矩的2倍。尤其是有些应用场合必须严格遵守这一准则,这不仅是对减速机里面齿轮的保护,更主要的是避免输出轴就被扭断。这主要是因为,如果设备有问题,减速机的输出轴及其负载被卡住了,这时驱动电机的过载能力依然会使其不断加大出力,进而,可能使输出轴承受的力超过其额定输出扭矩的2倍而扭断行星减速机的输出轴。
3、同样输出轴也有折断或弯曲现象发生,其原因与驱动电机的断轴原因相同。但减速机的出力是驱动电机出力和减速比之积,相对于电机来讲出力更大,故输出轴更易被折断。因此,用户在使用行星减速机时,对其输出端装配同心度的保证也应十分注意。
伺服行星减速机的参数介绍
减速比
输出转速:输入转数
段/级数
行星齿轮的套数。由于一套行星齿轮无法满足较大的传动比,有时需要二套或三套来满足用户对较大传动比的要求,也就是说,减速比越大,段/级数越多,效率越低平均寿命
指减速机在额定负载下,额定输入转数时减速机的连续工作时间。
精度
在高速机械往复运动中到的关键在于尽量减少通过运动产生的角偏差。精度取决于两个值,一个是于加载有关的偏转角,涉及到回程间隙和扭转刚度;另一个是于运动控制有关的偏转角,涉及到同步偏差问题。
回程间隙齿隙
将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是"分",就是一度的六十分之一.也有人称之为背隙。
额定输出扭矩
指减速机连续长时间工作时可以加载的力矩,条件应满足负载均匀,安全系数大于1.
加速扭矩
指工作周期每小时少于1000次时允许短时间加载.不能超过10000次。
紧急制动扭矩
指减速机输出端所能加载的力矩,这个力矩可在减速机寿命期内加载1000次,不能超过1000次。
空载扭矩
指加载到减速机上的以克服减速机内摩擦力的力矩。
扭矩
指减速机在静态条件或频繁启动条件下所能承受的输出扭矩,通常指峰值负载或启动负载。
实际所需扭矩
所需扭矩取决于应用场合的实际工况,拟选减速机的额定扭矩必须大于这个扭矩。
侧倾扭矩
指轴向力和径向力作用于输出端轴承上径向受力点的力矩。
轴向力
是指平行于轴心的一个力,它的作用点与输出轴端有一定的轴向偏差时,会形成一个额外的弯挠力矩。轴向力超过额定值时,需用联轴节来抵消这种弯挠力。
径向力
指垂直作用于轴向力的一个力,它的作用点与轴端有一定的轴向距离,这个点成一个杠杆点,横向力形成一个弯挠力矩。
轴伸径向载荷
选择减速机的附加依据是输出轴伸出端上的径向载荷和轴向载荷。轴的强度和轴承的承载能力决定了许用轴伸的径向载荷。产品样本中给出的允许值是指在 不利的方向作用在轴伸出端中点的力。当作用力不在中点时,越接近轴肩,允许的径向载荷就越大;相反,作用点离轴肩越远,允许的径向载荷就越小。
安全系数
安全系数等于减速机的额定输入功率与电机功率的比值。
使用系数
使用系数表现减速机的应用特性,它考虑到减速机的负载类型和每日工作时间。
力矩
减速机的以及电机与减速机的连接(输入轴采用性联轴器要求),都是有力矩要求。建议使用力矩扳手来完成步骤。
2,选择步进电机还是伺服电机系统? 其实,选择什么样的电机应根据具体应用情况而定,各有其特点。请见下表,自然明白。 步进电机系统 伺服电机系统 力矩范围 中小力矩(一般在20Nm以下) 小中大,全范围 速度范围 低(一般在2000RPM以下,大力矩电机小于1000RPM) 高(可达5000RPM),直流伺服电机更可达1~2万转/分 控制方式 主要是位置控制 多样化智能化的控制方式,位置/转速/转矩方式 平滑性 低速时有振动(但用细分型驱动器则可明显改善) 好,运行平滑精度 一般较低,细分型驱动时较高 高(具体要看反馈装置的分辨率) 矩频特性 高速时,力矩下降快 力矩特性好,特性较硬 过载特性 过载时会失步 可3~10倍过载(短时) 反馈方式 大多数为环控制,也可接编码器,防止失步 闭环方式,编码器反馈 编码器类型 - 光电型旋转编码器(增量型/值型),旋转变压器型 响应速度 一般 快 耐振动 好 一般(旋转变压器型可耐振动) 温升 运行温度高 一般 维护性 基本可以免维护 较好 价格 低 高
+< 20-512
P