热点资讯
当前位置: 主页 > >
广元批发新传动设备轮轴式ZPLE90-35高能效行星减速器
文章来源:ymcdkj
发布时间:2024-05-02 15:08:28
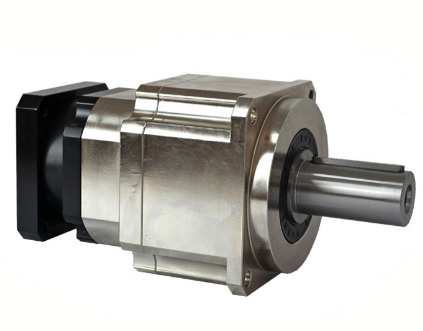
广元新传动设备:轮轴式ZPLE90-35高能效行星减速器
此时要对模具损坏的口进行补焊修配簧等性零件:在使用过程中,簧是模具 易损坏的零件之一,通常出现断裂和变形现象。采取的法就是更换,但是更换过程中一定要注意簧的规格和型号,簧的规格型号通过颜色、外径和长度三项确定,只有在此三项都相同的情况下才可以更换。冲头、冲套:模具上使用的冲头、冲套大部分都采用标准件,模具在使用过程中冲头易出现折断、弯曲和啃坏现象。冲套一般都是啃坏的。冲头和冲套的损坏一般都用相同规格的零件进行更换。
广元新传动设备:轮轴式ZPLE90-35高能效行星减速器
矿串轴的其他原因:
1、精密行星减速机承受正负扭矩作用时,齿厚误差、齿面不均匀磨损和过早磨损、齿背变形造成串轴。
2、齿轮螺旋角误差造成串轴。中间轴和输出轴上两半从动人字齿轮,由于实际螺旋角的误差,会使人字齿轮对中线发生变化,造成串轴。
3、精密行星减速机齿轮偏斜造成串轴。中间轴上的从动齿轮偏斜可造成串轴。齿轮是以外圆和端面进行的,而齿轮装配是以内孔的,有时内孔与外圆不同心,或者内孔与端面不垂直,就会使的齿轮与内孔中心线出现偏斜。这种偏斜的人字齿轮,其对中线所在的平面与轴线不垂直,当齿轮旋转一周时,对中线上的某一点将会发生轴向往复串动一次,迫使输入轴也轴向往复串动一次。在实际传动中,由于两半从动齿轮的偏斜程度不同,对于输入轴来讲,产生轴向串动是中间轴上两半从动齿轮不同偏斜程度综合作用的结果。此外,输出轴上的从动齿轮,由于齿轮偏斜也同样造成串动,但是由于输出轴在轴向是固定的,就迫使中间轴,进而迫使精密行星减速机输入轴串动。
广元新传动设备:轮轴式ZPLE90-35高能效行星减速器
伺服行星减速机必知的设计内容:
1.仔细阅读和研究设计任务书,明确设计要求,分析原始数据和工作条件,拟定传动装置的总体方案。
2.选择电动机,确定其形式、转速和功率。
3.计算传动装置的总传动比和分配各级传动比。
4.计算各轴的转速、功率和扭矩。
5.通过计算确定式传动的主要参数和尺寸。
6.通过计算确定闭式传动的主要参数和尺寸。
7.初算各轴的直径,据此进行各轴的结构设计。
8.初定轴承的型号和跨距,分析物上的载荷,计算支点反力。
9.选择联轴器和链联接。
10.验算轴的复合强度和安全系数。
11.绘制伺服减速机装配图和零件工作图。
12.整理和编写设计说明书。
行星减速机星形齿轮构造受力性解析
显式动力学有限元理论显式有限元算法的控制方程描述如下。
显式有限元程序采用Lagrange描述增量法,其相关方程如下
1)动量方程ij+fi=xi(1)式中,ij为柯西应力;为密度;fi为单位质量体积力;xi为加速度。
2)能量方程为E=Vsijij-(p+g)V(2)式中,V为现时构形体积;ij为应变率张量;q为体积黏性阻力;sij、p分别为偏应力与压力,sij=ij+(p+g)ij,p=-13ijij-q.
3)质量守恒方程为=J0(3)式中,J为雅可比行列式;0为初始质量密度。
4)其边界条件中面力边界条件情况如下ijni=ti(t)在S1面力边界上式中,ni(i=1,2,3)为现时构形边界S1的外法线方向余弦;ti(i=1,2,3)为面力载荷。位移边界条件xi(Xj,t)=Di(t)在S2上的边界条件式中,Xj(j=1,2,3)为初始位移;Di(t)(i=1,2,3)为给移函数。
滑动接触面间断处的跳跃条件为(+ij-ij)nj=0,当x+i=x-i接触时沿接触边界S0。行星减速机行星齿轮参数及材料属性行星齿轮结构各个齿轮的参数设置为:模数为4,压力角为20,齿宽为50mm,太阳轮、行星 阳轮行星轮的材料为Cr-Ni-Mo合金钢,其内齿圈采用42CrMo合金钢。
广元新传动设备:轮轴式ZPLE90-35高能效行星减速器
+
64-P2-S2
44-P2-S2
10-P2-S2
20-P2-S2
24-P2-S2
64-P2-S2
44-P2-S2
10-P2-S2
25-P2-S2
20-P2-S2
24-P2-S2
64-P2-S2
44-P2-S2
10-P2-S2
20-P2-S2