热点资讯
当前位置: 主页 > >
南京供应机电EAMON牌BH150R-L2-30-B1-D1-S7低噪音行星减速机
文章来源:ymcdkj
发布时间:2024-05-02 15:28:30
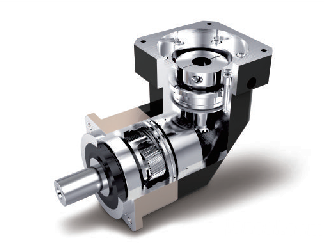
B1-D1-S7低噪音行星减速机
需要指出的是,尽管有关无人机巡线的发展势头迅猛,但其在作业过程中,避障技术依然有待完善,有关无人机的续航问题,也需要得到解决,尤其是在大面积巡检之时,而飞手的短缺也毫无疑问是很棘手的问题。根据 法律法规和相关政策,来推进无人机基础技能的培训工作,是合法合规展无人机巡检作业的基础工作,当然,也只有立足电网巡检去深化无人机技能培训,也才能切实提高巡检人员技能水平。然而,要不断适应未来的发展,无人机巡线也需要与其他技术相结合。
2.润滑油和添加剂的选用。蜗齿减速机一般选用220#齿轮油,对重负荷、启动频繁、使用环境较差的减速机,可选用一些润滑油添加剂,使减速机在停止运转时齿轮油依然附着在齿轮表面,形成保护膜,防止重负荷、低速、高转矩和启动时金属间的直接接触。添加剂中含有密封圈调节剂和抗漏剂,使密封圈保持柔软和性,有效减少润滑油漏。
行星减速机星形齿轮构造受力性解析
显式动力学有限元理论显式有限元算法的控制方程描述如下。
显式有限元程序采用Lagrange描述增量法,其相关方程如下
1)动量方程ij+fi=xi(1)式中,ij为柯西应力;为密度;fi为单位质量体积力;xi为加速度。
2)能量方程为E=Vsijij-(p+g)V(2)式中,V为现时构形体积;ij为应变率张量;q为体积黏性阻力;sij、p分别为偏应力与压力,sij=ij+(p+g)ij,p=-13ijij-q.
3)质量守恒方程为=J0(3)式中,J为雅可比行列式;0为初始质量密度。
4)其边界条件中面力边界条件情况如下ijni=ti(t)在S1面力边界上式中,ni(i=1,2,3)为现时构形边界S1的外法线方向余弦;ti(i=1,2,3)为面力载荷。位移边界条件xi(Xj,t)=Di(t)在S2上的边界条件式中,Xj(j=1,2,3)为初始位移;Di(t)(i=1,2,3)为给移函数。
滑动接触面间断处的跳跃条件为(+ij-ij)nj=0,当x+i=x-i接触时沿接触边界S0。行星减速机行星齿轮参数及材料属性行星齿轮结构各个齿轮的参数设置为:模数为4,压力角为20,齿宽为50mm,太阳轮、行 太阳轮行星轮的材料为Cr-Ni-Mo合金钢,其内齿圈采用42CrMo合金钢。
接下来要考虑行星减速机的回程间隙。回程间隙越小其精度越高,成本也越高。用户要选择满足其精度要求系列的减速机就可以。回程间隙指标是以同型号批量生产中回程间隙的一台标准,而实际中98%以上的行星减速机实际回程间隙小于给定指标的50%。
还要考虑横向/径向受力和平均寿命。横向/径向受力大的减速机在和使用中可靠性高,不易出问题。而实际寿命可按厂家给出的软件来计算。通常其平均寿命远超过所配伺服电机的寿命。
上一篇:上海铝镁合金6063注重质量
下一篇:南开学生上下床制式单人床