热点资讯
当前位置: 主页 > >
两面井乡新机电轮轴式ZAF060-L2-50-K9-11弯头步进减速机
文章来源:ymcdkj
发布时间:2024-05-04 08:09:18
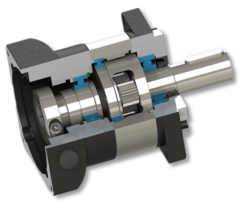
K9-11弯头步进减速机
须将2个轴承面向使用,或作为成对双联轴承,双列轴承使用。组合及双列圆锥滚子轴承当径向载荷作用于圆锥滚子轴承时,内部接触角会产生诱导轴向载荷。诱导轴向载荷产生使内圈、外圈分离的作用力,所以通常采用成对或多列圆锥滚子轴承以抵消此力。四列圆锥滚子轴承。推力球轴承特点:推力球轴承是一种分离型轴承,轴圈、座圈可以和保持架、钢球的组件分离。轴圈是与轴相配合的套圈,座圈是与轴承座孔相配合的套圈,和轴之间有间隙;推力球轴承只能够承受轴向负荷,单向推力球轴承是只能承受一个方向的轴向负荷,双向推力球轴承可以承受两个方向的轴向负荷。
行星减速机的齿轮按照形状主要有直齿轮,斜齿轮,伞齿轮,曲面齿轮几种。
一、斜齿轮
行星减速机齿轮的轮齿有一位角度或者是与其轴线旋转一定角度在平面齿轮机构中相互齿合,斜齿轮齿面相齿合于一条倾斜于轴承的直线上,齿合线的长度从0逐渐变化到再从变化到0,轮齿的加载和卸载变得均匀。人字齿轮相当于齿轮和右旋齿轮并在一起,因为轮齿存在一定的角度,斜齿轮产生相当大的轴间推力,人字齿轮通过相互抵消纠正了这一推力,允许其使用推力轴承代替不同推力轴承,通常是为了方面经常沿着齿轮一个中心槽。
行星齿轮减速机工作原理:
1)齿圈固定,太阳轮主动,行星架被动。 此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
2)齿圈固定,行星架主动,太阳轮被动。此种组合为升速传动,传动比一般为0.2~0.4,转向相同。
3)太阳轮固定,齿圈主动,行星架被动。此 ,转向相同。
4)太阳轮固定,行星架主动,齿圈被动。此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
5)行星架固定,太阳轮主动,齿圈被动。传动比一般为1.5~4,转向相反。
6)行星架固定,齿圈主动,太阳轮被动。此种组合 相反。
7)把三元件中任意两元件结合为一体的情况:当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情况。行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接档。
8)三元件中任一元件为主动,其余的两元件自由:从分析中可知,其余两元件无确定的转速输出。第六种组合方式,由于升速较大,主被动件的转向相反,在汽车上通常不用这种组合。其余的七种组合方式比较常用。
所谓矢量变换控制就是模仿Dc伺服电动机的控制,把异步伺服电动机的定子电流分成两个电流分量进行分别独立控制,一个电流分量与转子磁通方向一致,该电流分量称为定子电流的励磁分量;另一个电流分量与转子磁通垂直,该分量称为定子电流的转矩分量。由于实现矢量变换计算复杂,电动机低速特性 ,容易发热。因此,在功率为千瓦、转速下限为几分钟一转的进给伺服驱动中,大多数情况下,都采用同步型伺服电动机。 作为伺服驱动用的同步电动机,在转子上装有永磁材料,产生恒定磁场。在伺服电动机轴的非负载侧速度检测器和位置检测器。位置检测器的一个用途就是用以检测永磁体的磁极位置。由磁极位置信号控制同步伺服电动机电枢电流的相位以实现转子磁场方向与电枢电流矢量的磁场在空间上正交,在其他条件一定时所产生的电磁转矩。由于可以连续测量出磁场位置,因此,就可以对电枢电流的相位进行精细的控制。对定子电流幅值和相位进行控制,达到了对定子电流瞬间值进行细微控制的要求。应该进一步指出,电动机的转子磁通系由转子上的永磁体产生且保持恒定,所控制的定子电流与磁场正交,完全是用来产生转矩的。这一点和Dc伺服电动机是一样的,电磁转矩和定子电流具有线性关系。如果转子磁通和定子电流矢量间不是正交的话,则可能导致气隙的有效磁场增加或减少,电动机的运行状态将发生变化。
+ -R005-P1-P2< 100-P1-P2
040-P1-P2