热点资讯
当前位置: 主页 > >
魏村镇设备伺服式BH150A-L2-35-B1-D1-S6弯头伺服变速器
文章来源:ymcdkj
发布时间:2024-05-05 07:51:08
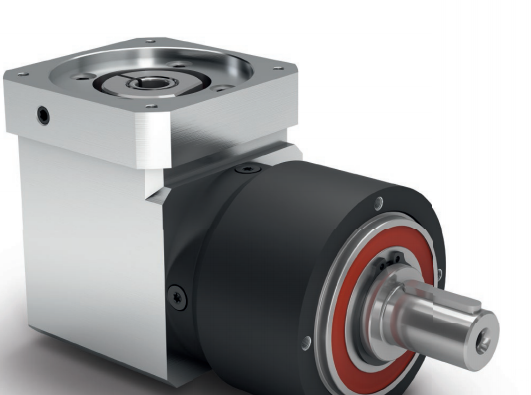
-D1-S6弯头伺服变速器
当镀液中铜、铅、铁等金属杂质含量增多时,会造成镀层粗糙、表面发黑,严重影响镀层表面质量。可定期用1~3g/L 去除,为了降低成本,日常维护也可用化学纯的 ,每次加入量13mL/L可有效除杂净化,但不能超过15mL/L,否则将对镀液产生 影响。除去铜、铅等金属杂质也可采用小电流密度电解法,但时间较长,锌的损耗大。如果在用 的同时,采用小电流密度电解效果更好。随着生产时间的增长,光亮添加剂产物累积越多,加上镀液温度的增加,光亮添加剂加快,物累积增多后,将严重影响镀层外观质量,必须用活性炭吸附后才能解决问题。
行星减速机的专业术语
减速比:输入转速与输出转速之比。
级数:行星齿轮的套数。一般可以达到三级,效率会有所降低。
满载效率:在负载情况下(故障停止输出扭矩),减速机的传递效率。
工作寿命:行星减速机在额定负载下,额定输入转速时的累计工作时间。
额定扭矩:是额定寿命允许的长时间运转的扭矩。当输出转速为100转/分,减速机的寿命为平均寿命,超过此值时减速机的平均寿命会减少,当输出扭矩超过两倍时减速机故障。
噪音:单位分贝dB(A),此数值实在输入转速3000转/分,不带负载,距离减速机1米距离时测量值。
回差:将输入端固定,是输出端顺时针和逆时针方向旋转,当输出端承受正负2%额定扭矩时,减速机输出端由一个微小的角位移,此角位移即为回程间隙,也称“背隙”。单位是“分”,即一度的1/60。
行星齿轮减速机工作原理:
1)齿圈固定,太阳轮主动,行星架被动。 此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
2)齿圈固定,行星架主动,太阳轮被动。此种组合为升速传动,传动比一般为0.2~0.4,转向相同。
3)太阳轮固定,齿圈主动,行星架被动。此种组合为降速传动,传动比一般为1.25~1.67,转向相同。
4)太阳轮固定,行星架主动,齿圈被动。此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
5)行星架固定,太阳轮主动,齿圈被动。传动比一般为1.5~4,转向相反。
6)行星架固定,齿圈主动,太阳轮被动。此种组合为升速传动,传动比一般为0.25~0.67,转向相反。
7)把三元件中任意两元件结合为一体的情况:当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情
况。行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接
档。
8)三元件中任一元件为主动,其余的两元件自由:从分析中可知,其余两元件无确定的转速输出。第六种组合方式,由于升速较大,主被动件的转向相反,在汽车上通常不用这种组合。其余的七种组合方式比较常用。
2、分类 感应子式步进电机以相数可分为 :二相电机、三相电机、四相电机、五相电机等。以机座号(电机外径)可分为:42BYG(BYG为感应子式步进电机代号)、57BYG、86BYG、110BYG、(标准),而像70BYG、90BYG、130BYG等均为国内标准。 3、步进电机的静态指标术语相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力矩是衡量电机体积(几何尺寸)的标准,与驱动电压及驱动电源等无关。 虽然静转矩与电磁激磁安匝数成正比,与定齿转子间的气隙有关,但过份采用减小气隙,增加激磁安匝来提高静力矩是不可取的,这样会造成电机的发热及机械噪音。
-1000-S2