热点资讯
当前位置: 主页 > >
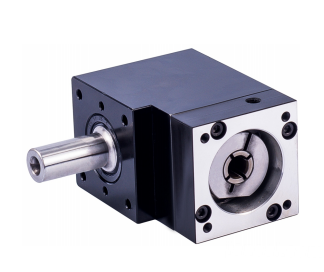
工匠之心机电轮轴式PLS080-L3-250-S2-P2定位用行星减速机
文章来源:ymcdkj
发布时间:2024-05-06 09:56:54
S2-P2用行星减速机
手锯为木工鼻祖鲁班所发明, 古老的木工手锯通常结构呈现为曰形状,通过调节锯条对侧的螺丝的松紧来使锯条绷直方便作业,经过不断的改良现在越来越小巧,也多出了更多的品种。出现了钢锯,直锯等品种。手锯的使用方法:手锯的握法右手满握锯柄,左手轻扶锯 前端。锯割时的起锯起锯很重要,一般用左手拇指指甲靠稳锯条,以防止锯条滑动。同时起锯角度小于15°,若起锯角度过大,锯齿易崩碎,但起锯角也不宜太小,否则不宜切入材料。
工 2-P2用行星减速机
伺服行星减速机的输出转矩如何算
伺服电机按上减速机后,行星减速机输出的功率和伺服电机的功率 ,输出转矩怎么算呀, 减速机只是个传动装置!作用是降低速度的同时增加扭矩!比如安川电机400W,额定转速3000转,额定扭力是1.27Nm,减速机的减速比是1:10,那么整体输出扭矩就是12.7Nm!输出转速就是300转。也就是说降低几倍的速度,就增加几倍的扭力!我是伺服行星减速机的厂家,希望能帮到你!
工匠 -P2用行星减速机
2.环控制和闭环控制
数控机床伺服驱动系统的基本组成如图所示。数控机床的伺服驱动系统按有无反馈检测单元分为环和闭环两种类型(见数控机床伺服驱动系统分类),这两种类型的伺服驱动系统的基本组成不完全相同。但不管是哪种类型,执行元件及其驱动控制单元都必不可少。驱动控制单元的作用是将进给指令转化为驱动执行元件所需要的信号形式,执行元件则将该信号转化为相应的机械位移。
环伺服驱动系统由驱动控制单元、执行元件和机床组成。通常,执行元件选用步进电机。执行元件对系统的特性具有重要影响。
闭环伺服驱动系统由执行元件、驱动控制单元、机床,以及反馈检测单元、比较控制环节组成。反馈检测单元将工作台的实际位置检测后反馈给比较控制环节,比较控制环节将指令信号和反馈信号进行比较,以两者的差值作为伺服系统的跟随误差经驱动控制单元,驱动和控制执行元件带动工作台运动。
在CNC系统中,由于计算机的引入,比较控制环节的功能由软件完成,从而导致系统结构的一些改变,但基本上还是由执行元件、反馈检测单元、比较控制环节、驱动控制单元和机床组成。
伺服行星减速机的主要传动结构为:行星轮,太阳轮,外齿圈.由于结构原因,减速机的单级减速为3,一般 0,减速机级数一般不超过3,但有部分大减速比减速机有4级减速. 不同于其他减速机的是行星减速机具有高刚性,高精度(单级可到1分以内),高传动效率(单级在97%-98%),高的扭矩/体积比,终身免维护等特点. 行星减速机多数是在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量. 行星减速机额定输入转速可达到18000rpm(与减速机本身大小有关,减速机越大,额定输入转速越小)以上,工业级行星减速机输出扭矩一般不超过2000Nm,特制超大扭矩行星减速机可到10000Nm以上.工作温度一般在-25℃到100℃左右,通过改变润滑脂可改变其工作温度. 关于行星减速机的几个概念: 级数:行星齿轮的套数.由于一套星星齿轮无法满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求.由于增加了星星齿轮的数量,所以2级或3级减速机的长度会有所增加,效率会有所下降. 回程间隙:将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,伺服减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是"分",就是一度的六十分之一.也有人称之为背隙. 行星减速机是一种用途广泛的工业产品,其性能可与其它品级减速机产品相媲美,却有着工业级产品的价格,被应用于广泛的工业场合。
工匠 -P2用行星减速机
+ -8-10-S2-P2< 5-28-S2-P2 0-80-S2-P2 -10-S2-P2
80-S2-P2
25-S2-P2
-10-S2-P2
80-S2-P2
25-S2-P2
-10-S2-P2
到头轮和底轮的传动轴在同一垂直平面内,而且都在水平位置上,整机中心线在1mm高度上垂直偏差不超过2mm,积累偏差不超过8mm。料斗带接头不正料斗带接头不正是指料斗带结合后,料斗带边缘线不在同一直线上。工作时,料斗带一边紧一边松,使料斗带向紧边侧向,产生跑偏,造成料斗盛料不充分,卸料不,回料增多,生产率下降,严重时造成料斗带卡边、撕裂。这时应停机,修正接头并接好。回料过多提升机回料是指物料在卸料位置没有完全卸出机外,而有部分物料回到提升机机座内的现象。