热点资讯
当前位置: 主页 > >
姜谭街道机械设备伺服式ZAF060-L1-3-K6-14超高温步进减速机
文章来源:ymcdkj
发布时间:2024-05-06 18:00:03
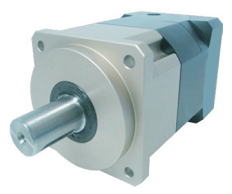
姜谭街道机械设备:伺服式ZAF060-L1-3-K6-14超高温步进减速机
等离子体与人们对目前称之为等离子体态物质的认识可以追溯到1879年威廉克鲁克斯(WilliamCrookes)对真空放电管的研究。当时它被实验者叫radiantmatter。接着,1897年英国物理学家SirJ.J.Thomson对真空放电管的性质进一步研究,并把其中产生的物质叫阴极射线cathoderay。到1928年,由艾瓦尔.朗谬尔(IrvingLangmuir)将放电管中的电离气体 终命名为等离子体,距今已有8多年了[1-2]。
衡量行减速机性能的几个关键技术参数是:减速比,平均寿命,额定输出扭矩,回程间隙,满载效率,噪音,横向/径向受力和工作温度。输出转速与输入转速的比值。
级数:太阳轮及其周围的行星轮构成独立的减速轮系,如减速机内只此一个轮系,我们称为“ ”。为得到较大减速比,需多级传动。
平均寿命: 指减速机在额定负载下,输入转速时的连续工作时间。
额定输出扭矩: 指在额定负载下长期工作时允许输出扭矩。输出扭矩是该值的两倍。 回程间隙: 将输出端固定,输入端顺时针和逆时针方向旋转,使输出端产生额定扭矩的±2%扭矩时,减速机输入端有一个微小的角位移,此角位移即为回程间隙。单位是“弧分”。
润滑方式:行星减速机在整个使用期间无需润滑。 满载效率: 指在负载情况下,减速机的传输效率。它是衡量减速机的一关键指标, 满载效率高的减速机发热少,整体性能好。
噪音:单位是分贝(dB)A。此数值是在输入转速为3000转/分钟时,不带负载,距离减速机一米距离时测量的。
行星减速机采用全新斜齿齿轮设计
摘要:直齿轮的缺点主要在于它们会产生振动。不论是由于设计、或形变等方面的原因,在同一时刻沿整个齿面上可能发生渐线外形的一些变化。这将导致一个有规律的,每齿一次的激励,它常是很强烈的。由此产生的振动既在齿轮上引起大的负载,又引起噪声。还有一个不利点是,在接触时间里有时由两对齿啮合所得到的附加强度并不能加以利用,因为应力是被循环中单齿啮合的状况所限定的。
斜齿轮可看成是由一组薄片宜齿齿轮错位放置成的圆柱齿轮,这样每一片的接触是在齿廓的不同部位,从而产生了补偿每个薄片齿轮误差的作用,这个补偿作用由于轮齿的性而非常有效,因而得出这样的结果,误差在10mm以内的轮齿能够使误差起平均作用,因而在有负载情况下,能如误差为1mm内的轮齿那样平稳运行。因为在任何瞬时,大约有一半时间(定重合度约为1.5)将有两个齿啮合,这就在强度方面带来额外的好处。因此应力可建立在1.5倍齿宽,而不是一个齿宽的基础上。
和装配一大堆薄片直齿轮是既困难又不经济,因此就成连成一体的,轮齿沿螺旋线方向的齿轮。斜齿轮不象直齿轮,它会导致 的轴向力。但在振动和强度方面带来的好处远胜于由轴向推力和略增的成本带来的缺点。因此在减速机中选用斜齿轮而非直齿轮.比如四大系列:同轴式斜齿轮减速机、螺旋锥齿轮减速机、斜齿轮蜗轮蜗杆减速机、平行轴斜齿轮减速机。
从而得出:
Jem-——折算到电机轴上的等效转动惯量(kgm2)
JL——载荷转动惯量(kgm2)
从上述推演可看出,平时我们很熟悉的关于齿轮箱的公式,都是源自物理学的能量守恒定理。
上述的(1)—(3)表示了减速机的三个基本功能:
1. 降低伺服电机的转速( =/ i)
伺服电机 rpm之间,甚至高达10000rpm以上,实际使用过程中很少使用到如此高的转速,同时为了充分利用电机的额定功率,所以需要通过合适减速比的减速机来获得需要的工作转速。
2. 转矩放大(=iη)
在电机输入给减速机的功率一定的情况下,由于减速机输出速度的降低,必然会获得更大的输出转矩。很多情况下这也是选用减速机的一个重要理由。
3. 匹配负载转动惯量()
伺服电机的惯量是比较小的,一般来说折算到伺服电机本身的负载惯量不能超过伺服电机本身惯量的4倍(不同品牌伺服电机的设计有很具体的数据),而实际应用中的负载有很多种,如果负载的惯量与电机能接受的惯量相差太远,就会大大降低伺服电机的响应速度,从而影响生产效率和增大动态误差。而减速机就能起到匹配惯量的关键作用。
+