当前位置: 主页 > >
积翠乡传动装置伊明牌ZPLE60-35精密行星减速器
文章来源:ymcdkj
发布时间:2024-05-08 14:51:13
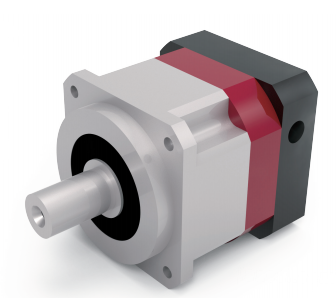
积翠乡传动装置:伊明牌ZPLE60-35精密行星减速器
电热水 由于其节水性能以及快速达到恒定温度的性能深受人们的喜爱,电热水 的使用质量一部分来源于其自身材质以及生产工艺的优良性,而另一方面则来源于电热水 的质量,电热水 步骤与流程直接决定了其质量。其具体流程与步骤如下:过滤网:电热水 必须在进水口过滤网,因自来水里有少量的杂物,电热水 以免卡住浮磁或堵塞花洒。如果滤网堵塞,会使流量降低、出水变小,浮磁不动作电热水 无法加热。
积翠乡传动装置:伊明牌ZPLE60-35精密行星减速器
第六种组合方式,由于升速较大,主被动件的转向相反,在汽车上通常不用这种组合。其余的七种组合方式比较常用。
1.保证装配质量。可购或一些专用工具,拆卸和减速机部件时,尽量避免用锤子等其他工具敲击;更换齿轮、蜗轮蜗杆时,尽量选用原厂配件和成对更换;装配输出轴时,要注意公差配合;要使用防粘剂或 油保护空心轴,防止磨损生锈或配合面积垢,维修时难拆卸。
2.润滑油和添加剂的选用。蜗齿减速机一般选用220#齿轮油,对重负荷、启动频繁、使用环境较差的减速机,可选用一些润滑油添加剂,使减速机在停止运转时齿轮油依然附着在齿轮表面,形成保护膜,防止重负荷、低速、高转矩和启动时金属间的直接接触。添加剂中含有密封圈调节剂和抗漏剂,使密封圈保持柔软和性,有效减少润滑油漏。
3.减速机位置的选择。位置允许的情况下,尽量不采用立式。立式时,润滑油的添加量要比水平多很多,易造成减速机发热和漏油。
4.建立润滑维护制度。可根据润滑工作“五定”原则对减速机进行维护,到每一台减速机都有责任人定期检查,发现温升明显,超过40℃或油温超过80℃,油的质量下降或油中发现较多的铜粉以及产生不正常的噪声等现象时,要立即停止使用,及时检修,排除故障,更换润滑油。加油时,要注意油量,保证减速机得到正确的润滑。
积翠乡传动装置:伊明牌ZPLE60-35精密行星减速器
(2)换向极 换向极的作用是改善换向,减小电机运行时电刷与换向器之间可能产生的换向火花,一般装在两个相邻主磁极之间,由换向极铁心和换向极绕组组成,换向极绕组用绝缘导线绕制而成,套在换向极铁心上,换向极的数目与主磁极相等。 (3)机座 电机定子的外壳称为机座,机座的作用有两个:一是用来固定主磁极。二是机座本身也是磁路的一部分,借以构成磁极之间磁的通路,磁通通过的部分称为磁轭。为保证机座具有足够的机械强度和良好的导磁性能,一般为铸钢件或由钢板焊接而成。 (4)电刷装置 电刷装置是用来引入或引出直流电压和直流电流的,如图1所示。电刷装置由电刷、刷握、刷杆和刷杆座等组成。电刷放在刷握内,用簧压紧,使电刷与换向器之间有良好的滑动接触,刷握固定在刷杆上,刷杆装在圆环形的刷杆座上,相互之间必须绝缘。刷杆座装在端盖或轴承内盖上,圆周位置可以调整,调好以后加以固定。
减速器是指原动机与工作机之间独立封闭式传动装置,用来降低转速并相应地增大转矩。此外,在某些场合,也有用作增速的装置,并称为增速器。
减速器的种类很多,这里仅讨论由齿轮传动、蜗杆传动以及由它们组成的减速器。若按传动和结构特点来划分,这类减速器有下述五种:
1.齿轮减速器
主要有圆柱齿轮减速器、圆锥齿轮减速器和圆锥-圆柱齿轮减速器。
2.蜗杆减速器
主要有圆柱蜗杆减速器、环面蜗杆减速器和蜗杆-齿轮减速器。
3.行星齿轮减速器
4.摆线针轮减速器
5.谐波齿轮减速器
上述五种减速器以有标准系列产品,使用时只需结合所需传动速率、转速、传动比、工作条件和机器的总体布置等具体要求,从产品目录或有关手册中选取即可。只有在选不到合适的产品时,才自行设计。
此外目前我国正在和推广的还有滚子凸轮减速器、超环面蜗杆减速器等新型减速器。
积翠乡传动装置:伊明牌ZPLE60-35精密行星减速器
100-S2-P2
例求3点的坐标,2点坐标(4,85),3点坐标(7,15)。A=y2-y3=-2B=x3-x2=3C=x3y2-ybx2=175求出圆心坐标为。两等距线方程联立 )+(y-15)=(15 的坐标为(66.34,17.231),具中心轨迹上其他基点或节点的坐标用相同的方法可求出,然后按此编程。数控车床想尖点的偏置计算在数控车削中,为了对方便,常以想尖P点来对。如果没有尖圆弧半径补偿,在车削锥面或圆弧时,会产生欠切现象。当零件精度要求较高且有锥面或圆弧时,解决法为:计算尖圆弧中心轨迹尺寸,然后按此编积,进行局部补偿计算。为在车削维面时,由于尖圆弧半径r引起的位补偿量。采用在Z向和X向同时进行具位置补偿时,实际刃与工件接触点A到编程时尖设定点P上,r的补偿量可按下式计算:在编制工件锥面程序时,其基点坐标为工件轮廓基点坐标(Z和X)加上尖圆弧半径r的补偿量(Dz和DX),这样就解决了没有尖圆弧半径补偿的问题。